ASML 스캐너의 역사 와 중국의 도전 (25.10.24)
들어가며...
칩 프린터 (리소그래피 장비) 를 통해 AI 혁명을 실현하고 있으며 이는 지금까지 만들어진 기계 중 가장 복잡한 기계입니다.

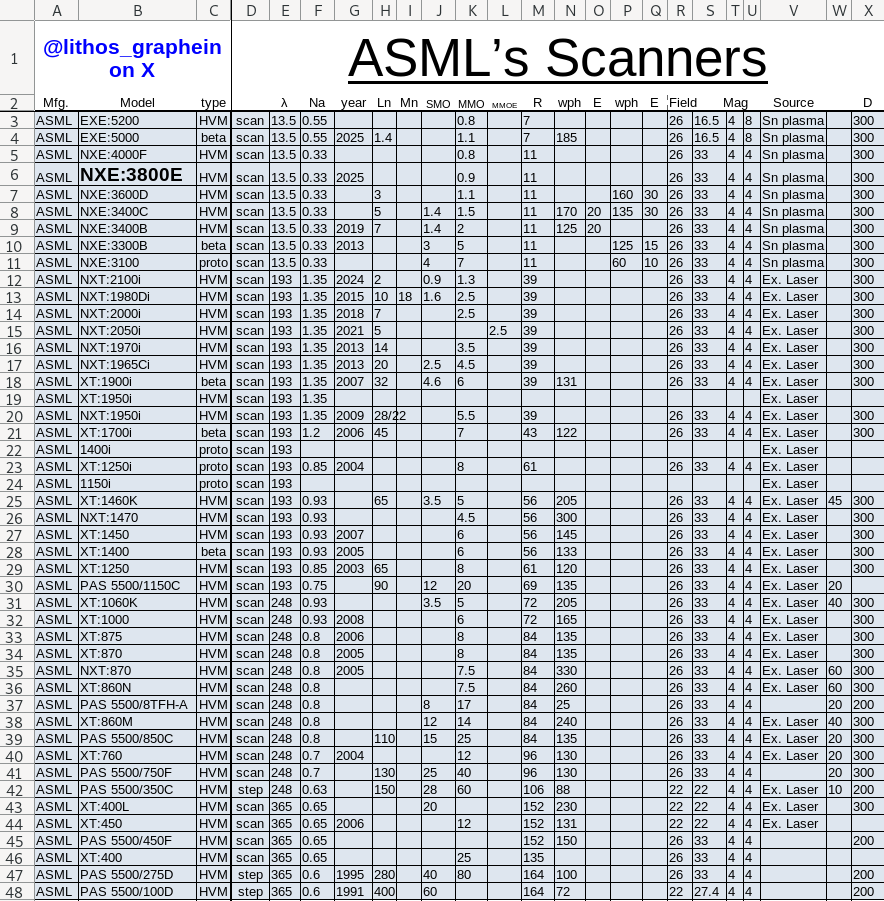
The List - ASML 스캐너 목록
지난 35년 동안 설치된 모든 ASML 스캐너 모델 목록을 소개합니다. 완전한 목록은 아닙니다. 몇 가지 빠진 것도 있을 수 있지만, 제가 직접 사용해 본 도구(대부분 그렇습니다)나 친구들이 사용해 보았다고 알려준 모델을 바탕으로 정리한 것입니다.
작은 글씨로 표시되어 있지만, 약 50개의 다양한 도구 모델로 구성된 방대한 목록입니다. 여기서는 이러한 역사를 자세히 살펴보고, 오늘날 전 세계 최첨단 칩 공장에 설치되는 최신 EUV 도구에 대해 알아보겠습니다.
Scanner Platforms
수년에 걸쳐 개발된 다양한 세대의 리소그래피 장비를 떠올릴 때, 우리는 종종 각 세대를 광원과 연관 짓습니다. 일반적으로 광원의 파장이 짧을수록 인쇄할 수 있는 회로 패턴의 크기가 작아집니다. 하지만 실제로 이는 퍼즐의 일부에 불과합니다. 스캐너의 진정한 투자 수익률(ROI)은 (팹은 결국 이러한 장비로 수익을 창출해야 하므로) 오버레이 사양(열 J-L)과 처리량(열 N/P)으로 요약할 수 있습니다.
오버레이는 스캐너가 회로 패턴을 얼마나 정확하게 배치할 수 있는지를 나타내는 것으로, 칩 수율에 가장 중요한 요소이며, 팹의 수익에 직접적인 영향을 미칩니다.
처리량은 장비가 시간당 처리할 수 있는 노광 횟수를 의미하며, 노광 횟수가 많을수록 장비의 투자 수익률이 높아집니다. 최신 EUV 모델의 가격은 대당 약 4억 달러에 달하기 때문에, 각 장비에서 더 많은 웨이퍼 노광량을 확보하는 것은 팹의 자본 지출과 생산량에 직접적인 영향을 미칩니다.
스캐너 플랫폼은 장비의 기본 프레임이자 작동 방식입니다. 단일 플랫폼에는 광원과 렌즈와 같은 다양한 구성 요소가 포함되어 있으며, 각 구성 요소를 사용하여 장비의 해상도를 설정할 수 있습니다. 하지만 플랫폼 유형과 각 플랫폼의 모델 반복은 오버레이와 처리량을 향상시키는 방식입니다. 궁극적으로 플랫폼 자체가 이러한 장비의 ROI를 개선하는 가장 좋은 방법입니다.

ASML은 수년에 걸쳐 5개의 스캐너 플랫폼을 개발했으며, 각 플랫폼에는 오버레이와 처리량 모두에 대한 반복적인 개선이 이루어진 일련의 툴 모델이 출시되어 팹이 리소그래피 투자에 대한 투자 수익률(ROI)을 향상시킬 수 있었습니다. 새로운 세대의 플랫폼이 출시될 때마다 투자 수익률(ROI)이 크게 향상되었습니다.
PAS 5500 플랫폼
이 플랫폼은 1990년대 초 ASML을 유명하게 만든 플랫폼으로, 오늘날에도 여전히 사용되고 있으며 ASML에서 완벽하게 서비스를 제공하고 있습니다. 이 플랫폼은 단일 웨이퍼 스테이지 시스템(나중에 자세히 설명)이었으며, 실제로 두 개의 하위 세대가 존재했습니다. 처음에는 한 번에 전체 칩 이미지를 노광하는 스테퍼로 시작하여 단일 다이에 걸쳐 레티클 이미지의 얇은 슬라이스를 스캔하는 스캐너로 발전했습니다. 스캐닝 시스템으로 전환하면서 칩의 다이 크기를 크게 늘릴 수 있었고, "완벽"해야 하는 부분이 줄어들어 렌즈 수차도 개선되었습니다.

WINSCAN XT Platform
이것은 최초의 듀얼 웨이퍼 스테이지 플랫폼이었습니다. 광학 장치 구성 방식에도 큰 변화가 있었지만, 추가 스테이지가 ROI에 실질적인 영향을 미쳤습니다. 얼마나 큰 변화였는지 제대로 이해하려면, 매우 높은 비용이 들었다는 점에 유의해야 합니다.
팹의 다양한 툴 구성 요소를 고려할 때, 가장 비싼 툴 구성 요소는 ALD 챔버나 에칭 챔버가 아니라 스케너 렌즈 이고, 그 다음은 스캐너 웨이퍼 스테이지입니다. 따라서 공장의 각 스캐너에 웨이퍼 스테이지를 추가하는 것은 매우 큰 비용 변화였습니다. 그렇다면 왜 이런 조치를 취했을까요? ROI입니다.

Pattern Alignment and Overlay
이 두 용어는 종종 혼용되지만, 리소그래피 분야에서는 매우 다른 개념입니다. 정렬은 스캐너가 칩 이미지를 다른 칩 이미지 위에 배치하는 작업입니다. 오버레이는 별도의 계측 장비에서 사후에 배치 오차를 측정하는 것으로, 스캐너의 성능을 알려줍니다.
이 작동 방식은 웨이퍼가 장비에 들어오면 기존 패턴을 찾기 위해 일련의 정렬 측정을 수행합니다. 그런 다음 소스와 렌즈를 사용하여 그 위에 새로운 칩 이미지를 노광합니다. 측정 횟수를 늘리면 최종 결과를 크게 향상시킬 수 있지만, 예상대로 장비 작동 속도가 느려지고 처리량이 감소합니다. 또한 단일 스테이지를 사용하는 경우 정렬 측정이 진행되는 동안 값비싼 렌즈는 작동을 멈추게 되어 사실상 시간과 비용 낭비입니다.
스테이지를 추가하면 한 스테이지에서 정렬 측정을 수행하는 동안 다른 스테이지에서 노광을 수행할 수 있습니다. 높은 모듈 비용에도 불구하고 오버레이와 처리량, 그리고 궁극적으로 장비의 투자 수익률(ROI)을 크게 향상시켰습니다.

TWINSCAN NXT Platform
NXT 플랫폼은 웨이퍼 스테이지의 근본적인 작동 방식에 큰 변화를 가져왔습니다. 이전 세대 스테이지는 공기압을 이용하여 평평한 백플레인 위에 스테이지를 매달아 두는 방식을 사용했습니다.
스테이지는 마찰 없이 떠다니며 노광 스캔 중에 독립적으로 움직일 수 있습니다. 하지만 NXT 시스템은 자석을 사용하여 스테이지를 매달아 놓습니다. 짐작하셨겠지만, 이를 통해 저희의 공통 플랫폼 테마인 ROI(투자수익률)가 크게 향상되었습니다. 스테이지는 가속 및 이동 속도가 훨씬 빨라져 처리량이 증가하고 위치 정확도도 향상됩니다.

Overlay vs. Stage Speed—A Modern Marvel
ASML 스캐너는 모델에 따라 시간당 약 200~300장의 웨이퍼를 처리할 수 있습니다. ASML은 개발 중인 최신 KrF 스캐너의 경우, 이 속도를 시간당 400장까지 끌어올릴 계획입니다.
- 250장/시간의 처리량은 14초마다 웨이퍼 한 장을 완전히 노출하는 것과 같습니다.
- 각 다이는 약 150밀리초 안에 스캔할 수 있습니다.
여기에 인쇄된 내용을 기억하세요. 수십 나노미터 크기의 회로 구조이며, 각 이미지에는 수십억 개의 개별 회로 부품이 있습니다.
이러한 스캔 속도로 작동하는 동안 전체 칩에 걸쳐 한 자릿수 나노미터 정확도로 패턴이 다른 패턴 위에 배치된다는 사실에 항상 놀랐습니다. 이 스테이지 시스템 내부에는 초당 2만 회 측정하는 수백 개의 센서가 있습니다. ASML에 따르면 위치 정확도는 60피코미터에 달하는데, 이는 실리콘 원자 크기보다 작습니다. 🤯

Immersion Lithography - 액침 리소그라피
이 글의 마지막 부분에서 다룰 또 다른 엔지니어링 기술을 간략하게 설명해야 할 것 같습니다. 최신 로직 및 메모리 칩은 액침 리소그래피(immersion lithography)라는 새로운 유형의 스캐너 기술에 크게 의존합니다. 간단히 말해, 렌즈와 웨이퍼 사이의 공극을 물로 대체하는 방식입니다. 이렇게 하면 렌즈의 가상 크기가 커지고 더 높은 해상도를 얻을 수 있습니다.
ASML이 이 기술을 개발할 당시, 리소그래피 업계의 많은 사람들은 이것이 말도 안 된다고 생각했고, 이 주제에 대한 모든 파워포인트 프레젠테이션에는 서핑보드와 엄청난 파도 이미지가 등장했습니다. 제가 ASML 스캐너 목록을 다시 살펴보면, 최종 생산 장비가 개발되기 전에 일련의 프로토타입과 베타 툴(1700i)이 등장합니다.
이 기술은 렌즈가 웨이퍼에 스캔할 때 물막이 떠 있어야 한다는 점에서 또 다른 현대의 경이로운 기술이라고 할 수 있습니다. 이 움직이는 물막에는 단 하나의 기포도 있어서는 안 됩니다. 웨이퍼에 단 하나의 물방울도 남아서는 안 되며, 패턴에 흔적을 남겨서도 안 됩니다. 이 모든 일은 이러한 단계들이 엄청난 속도로 움직이기 때문에 일어나야 합니다.

The EUV Era - EUV 시대
DUV 플랫폼과 ASML이 35년간 상업적 실현 가능성을 높이기 위해 어떤 노력을 기울였는지에 대해 논의했습니다. 하지만 두 가지 EUV 플랫폼에 대해 자세히 살펴보면, 개발 작업을 단순해 보이게 만드는 새로운 엔지니어링 과제들이 있습니다.
DUV 플랫폼은 해상도를 향상시키기 위해 각각의 새로운 광원과 렌즈 유형에 공통적인 기본 원리를 적용할 수 있었지만, EUV 시스템은 완전히 다른 방식으로 작동합니다. 즉, ASML은 플랫폼 자체뿐만 아니라 모든 하위 구성 요소를 재설계해야 했습니다.
이 글에서는 기존 DUV 시스템과 새로운 EUV 툴 간의 5가지 주요 차이점을 요약합니다. 각 시스템마다 양산 가능한 수준에 근접하는 결과물을 구현하기까지 수십 년간의 연구 개발과 점진적인 개선이 필요했습니다.

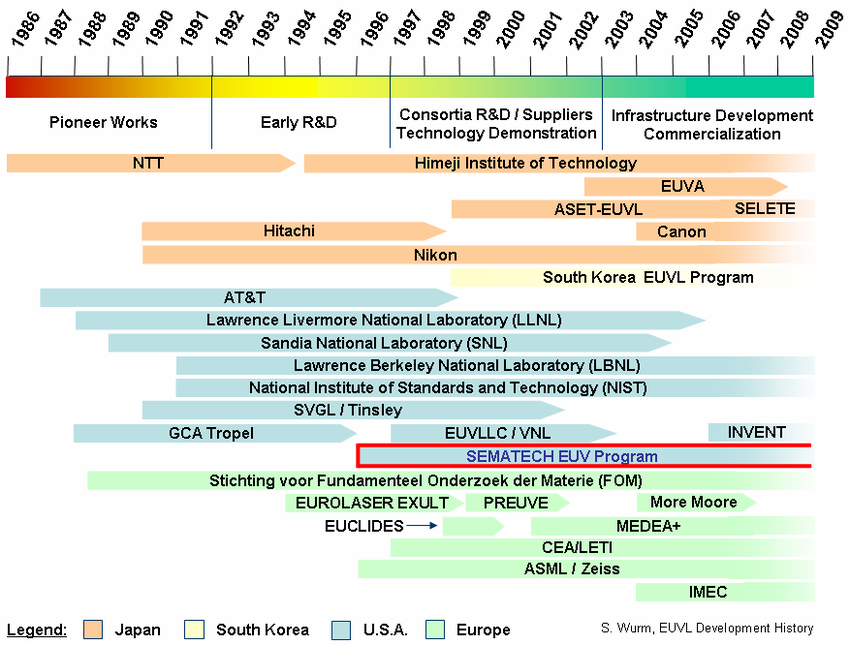
The EUV Development Timeline - EUV 개발 타임라인
EUV 리소그래피는 현재까지 리소그래피 분야에서 가장 복잡하고 야심 찬 프로젝트입니다. 상업적 규모로 제작된 장비 중 가장 복잡한 장비라고 할 수 있습니다. EUV 리소그래피 개발은 1980년대 중반에 시작되어 오늘날까지 이어지고 있습니다. ASML만이 이 모든 것을 해낸 것은 아닙니다. 전 세계 30개 이상의 다양한 기업들이 수십 년간 협력해 온 결과, ASML은 큰 도움을 받았습니다.
Exposing Product Wafers Drives Learning - 제품 웨이퍼 노출을 통한 학습 촉진
ASML 스캐너 모델 목록을 다시 살펴보겠습니다. 툴 유형은 C열을 참조하십시오. 보시다시피, 이러한 툴 모델의 대부분은 오늘날 개당 최대 2만 달러에 달하는 팹에서 제품 웨이퍼를 구동하는 HVM 머신이었습니다.
시제품 툴은 새로운 하위 부품에 대한 기본적인 R&D를 개발할 수 있는 최초의 시스템입니다. 대부분의 경우, 이러한 시스템은 초기 침지 및 EUV 시스템으로, 공정 운영 방식에 큰 변화가 필요했습니다.
베타 툴은 HVM 툴의 선구자이지만, 팹에서 해당 머신에 대한 충분한 투자 수익률(ROI)을 확보할 수 있을 만큼 상업적으로 실현 가능하지는 않습니다. 하지만 이러한 베타 시스템을 사용하면 완전히 통합된 테스트 로트를 실행하여 전기 데이터를 수집할 수 있으며, 더 중요한 것은 HVM을 준비하기 위해 머신에 상당한 양의 오버레이 데이터를 저장할 수 있다는 것입니다.
그리고 진정한 마법이 일어나는 곳이 바로 HVM(High Volume Manufacturing / 대량생산) 시스템입니다. 팹에서 수익을 창출하는 것입니다. ASML은 ROI 개선을 위한 각 반복 작업을 진행하면서 각 툴 모델에서 수백만 개의 웨이퍼를 처리해야 했습니다. 오버레이와 처리량을 모두 개선하기 위해 다음 모델에 어떤 조정이 필요한지 파악하기 위해 실제 제품에서 방대한 양의 데이터를 수집하고 평가합니다.
따라서 이러한 학습 과정은 ASML 공장 내부에서 이루어지는 것이 아닙니다. 팹은 수백만 개의 웨이퍼를 처리하는 데 수십억 달러를 투자해야 합니다. 이러한 방식을 통해서만 ASML은 속도를 유지하거나 개선하는 동시에 오버레이 성능을 나노미터 단위로 개선하여 점진적으로 발전할 수 있습니다. 이것이 바로 리소그래피를 다른 단위 공정과 차별화하는 핵심 요소입니다.

스캐너 회사들의 무덤은 가득합니다. 다른 회사들이 제품 출시 실패, 일정 미준수, 규모의 경제 등 사업 분야에서 실패하는 방식 때문이라고 생각할 수도 있습니다.
하지만 리소그래피는 여기서 또 다른 문제입니다. 그 이유는 하드웨어 매칭입니다. 간단히 말해, 한 종류의 스캐너 공급업체와 매칭 단계만 운영하면 수율과 투자 수익률(ROI) 측면에서 이점을 얻을 수 있습니다.
오버레이의 극한 정밀도는 서브나노미터 수준에 도달하고 있습니다. 이 수준에서 각 웨이퍼 척은 눈에 띄게 다른 오버레이 시그니처를 갖습니다. 실제로 스캐너 오버레이를 측정하는 일반적인 방법은 단일 머신 오버레이(SMO)입니다.
이 테스트에서는 웨이퍼를 하나의 스캐너에 있는 하나의 척에 노광한 후 패턴을 에칭합니다. 그런 다음 웨이퍼를 정확히 동일한 척과 스캐너에 노광하여 장비의 궁극적인 오버레이 성능을 확인합니다. 이렇게 하면 하드웨어 시그니처가 제거됩니다.
하지만 팹은 물류상의 이유로 이런 방식으로 운영할 수 없습니다. 따라서 현실적인 측정 방법은 매칭 머신 오버레이입니다. 이 방법에서는 여러 스캐너를 서로 매칭하고, 서로 다른 하드웨어 시그니처를 제거하는 보정 알고리즘을 적용합니다. 이제 서로 다른 두 스캐너 공급업체를 사용하는 경우를 생각해 보세요. 오버레이 페널티가 발생하고 궁극적으로 수율과 투자 수익률(ROI)에도 페널티가 발생합니다.
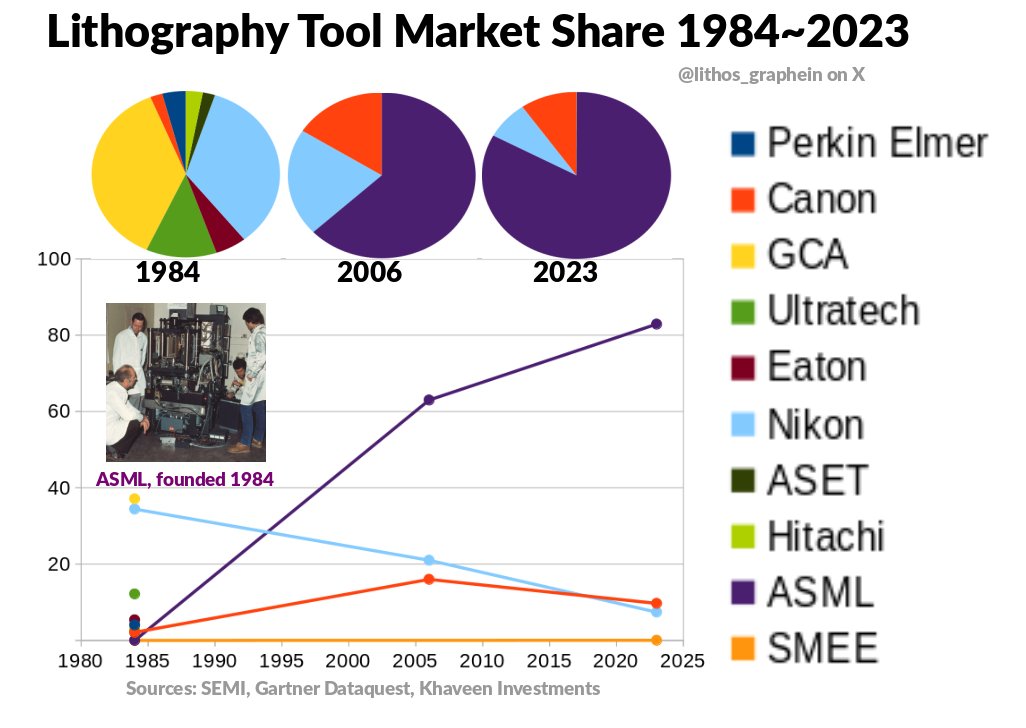
실제로 니콘의 침지형 스캐너는 ASML만큼 성능이 좋습니다. 팹(fab) 업체들은 ASML과 경쟁하기 위해 니콘 스캐너를 여러 대 도입하여 두 업체 모두에게 가격 압박을 가하고 싶어 합니다. 팹이 가장 원하지 않는 것은 공급업체 독점입니다. 하지만 안타깝게도 현실은 그렇지 않습니다. 이것이 니콘이 매년 ASML에 시장 점유율을 빼앗기는 이유입니다. 승자 독식의 구조입니다.
The Chip War
첨단 리소그래피 장비는 칩 전쟁의 핵심입니다. 실제로 중국에 대한 첫 번째 포격은 ASML의 EUV 스캐너 수출 금지였습니다. 이어서 ASML과 니콘이 제작한 최첨단 DUV 액침 시스템 수출을 금지하는 두 건의 조치가 이어졌습니다.
이러한 대응은 예상되었고 즉각적이었습니다. 소수의 중국 중소기업들이 스캐너 제조 사업에 진출하여 금지된 시스템을 대체할 장비를 개발할 것이었습니다. 이러한 조치가 완료되기까지 얼마나 걸릴지에 대한 많은 추측이 있었습니다.
제가 접한 대부분의 주장은 중국이 전기 자동차, 항공우주 등 다른 산업 분야에서 거둔 엄청난 성공에 관한 것이었습니다. 모두 매우 인상적이었고 매우 촉박한 일정 속에서 이루어졌습니다. 하지만 이러한 장비의 개발에는 일정에 영향을 미치는 완전히 다른 요소들이 있습니다. 각 요소는 매우 다릅니다.
한 분야의 빠른 발전이 다른 분야의 성공을 자동적으로 보장한다고 생각하지 않습니다. 또한 리소그래피 시스템 개발이 인류 역사상 가장 진보된 도구로 도약할 수 있다는 것이 기정사실이라고 생각하지 않습니다. ASML이 그랬던 것처럼 학습 과정이 매우 유사하게 이루어져야 한다고 생각합니다. 제 도구 모델 목록에서 볼 수 있듯이, HVM 용량으로 약 50번의 반복 작업이 필요했고, 프로토타입 R&D도 병행 진행되었습니다.

So how long then? - 그럼 얼마나 걸리나요?
NXT:2000i 동등 사양 2035년
NXE:3800E 동등 사양 2045년
- 이 목록을 보고 매년 최소 20번의 반복 작업과 새로운 모델 도입이 필요하지 않다고 생각하시나요?
- 각 새 모델마다 웨이퍼를 몇 개나 사용해야 하나요?
- 대부분의 팹이 이미 ASML 스캐너를 풀 장비로 가동하고 있는데, 하드웨어 매칭 딜레마를 어떻게 해결하시나요?
- 어떤 팹이 수율 손실을 감수해야 하나요?
- 상업적으로 실행 가능한 장비에서 투자 수익률(ROI)을 입증한 ASML과 Nikon과 어떻게 경쟁하나요? (모든 침지 스캐너가 차단된 것은 아닙니다.)
위와 같은 질문은 너무 많습니다.
- "과학" 부분은 기정사실입니다. ASML이 30년이나 걸렸던 EUV 개발 일정을 그보다 훨씬 짧은 시간 안에 압축해야 하는 것은 당연합니다.
- "엔지니어링" 부분은 너무 당연해서 중요하지 않습니다.

부록 - ASML과 중국시장
중국에서 칩을 생산하는 ASML DUV 기계가 최근 고장이 났다고 합니다. ASML 측은 네덜란드 ASML에 수리를 요청했고, ASML에서 기술자를 파견했습니다. 그들은 중국 측이 기계를 분해한 후 재조립하는 과정에서 고장이 났다는 것을 발견했습니다.
중국 기술자들이 구형 ASML DUV 장비를 분해한 이유는 최신 ASML 장비에 대한 미국의 제재를 필사적으로 피하기 위해서입니다. 중국 기술자들은 구형 장비를 분해하고 재조립을 시도하면서 배웁니다.
참고: 과거 일본/한국/대만 (소련) 도 선진국(미국)에서 최신 장비를 들여와 분해와 재조립을 해가며 역설계 (리버스 엔지니어링) 으로 기술을 습득해 왔습니다.
그들은 미국이 승인한 무기들을 무력화하기 위해 자체적으로 더 발전된 버전을 개발하는 방법을 알아내기 위해 자신들이 보유한 무기를 역설계하려 하고 있습니다. 하지만 그들은 그 방법을 알아낼 수 없는 것 같습니다.
ASML이 시스템을 수리했는지는 잘 모르겠습니다. 중국이 네덜란드 회사와 수리 계약을 맺었지만, 고객(중국) 측에서 기계 고장에 연루된 점을 고려하면 계약이 이행될 가능성은 낮다고 생각합니다.
중국은 많은 면에서 옳은 일을 합니다. 바로 그 점이 그들을 히틀러의 독일 이후로 우리가 경험해 본 어떤 도전자보다도 강력한 도전자로 만드는 것입니다. 하지만 그들도 인간입니다. 그리고 이것이 서방의 제재를 무력화시키려는 그들의 계략을 완전히 망가뜨렸을지도 모릅니다.
베이징은 더욱 절박해지고 있습니다. 실제로 우리는 중국 경제가 둔화되고 있다는 것을 알고 있습니다. (이것이 "중국이 붕괴되고 있다"는 것을 의미하는 것은 아닙니다. 단지 중국 정부가 의도치 않은 장벽에 부딪혀 더욱 위험해지고 있다는 것을 의미합니다.) 코로나19 이후 시진핑의 통치는 불안정해졌습니다.
기술 규제는 예상보다 더 큰 피해를 입히고 있습니다. 이러한 상황은 중국이 경제 및/또는 기술 분야에서 통제력을 행사할 수 없다면 군사 분야에서도 통제력을 행사하려 할 가능성을 시사합니다.
Working Cite
[1] https://x.com/lithos_graphein/status/1979652289708364226
[2] https://x.com/WeTheBrandon/status/1979727955262890475